SIERRA: A Modular Framework For Research Automation
Summary
A more detailed explanation of the SIERRA framework presented in AAMAS2022.
Note: The version of SIERRA demonstrated here is older than the current SIERRA version–see the docs for the latest overview.
This page contains:
An overview of the SIERRA architecuture and automation capabilities
A demonstration of SIERRA’s ability to automate generating experiments for multiple platforms:
[ROS1+Turtlebot3] (i.e., using ROS1 with the Turtlebot3)
A demonstration of SIERRA’s ability to visualize simulation results.
SIERRA Architecture
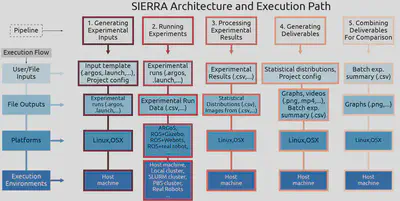
SIERRA Research Automation
1. Generating experiment inputs
Experiments using the scientific method have an independent variable whose impact on results are measured through a series of trials. SIERRA allows you to express this as a research query on the command line and then parses your query to make changes to a template input file to generate launch commands and experimental inputs to operationalize it. Switching from targeting platform A (e.g., ARGoS) to platform B (e.g., ROS1+Gazebo) is as easy as changing a a single command line argument (assuming your code is setup to handle both ARGoS and ROS1 environments!). Similarly for switching from running on the local machine to running on a HPC cluster. SIERRA handles all the “backend” aspects of running experiments and allows you to focus on the fun parts–the research itself!
2. Running experiments
SIERRA currently supports two types of execution environments: simulators and real robots, which are handled seamlessly with GNU parallel. For simulators, SIERRA will run multiple experimental runs (simulations) from each experiment in parallel (exact concurrency dependent on the limits of the computing hardware and the nature of the experiment). For real robots, SIERRA will execute one experimental run at a time, per configuration (runs can have different configuration/# of robots).
SIERRA supports multiple HPC environments for execution of experiments in simulation (docs) and on real robots (docs):
| Execution Environment | Supported Platforms |
|---|---|
| SLURM | ARGoS, ROS1+Gazebo |
| Torque/MOAB | ARGoS, ROS1+Gazebo |
| ADHOC (suitable for a miscellaneous collection of networked compute nodes for a research group) | ARGoS, ROS1+Gazebo |
| Local machine (for testing) | ARGoS, ROS1+Gazebo |
| ROS1+Turtlebot3 | ROS1+Gazebo, ROS1+robot |
To add additional execution environments, see the docs.
3. Processing experiment results
SIERRA supports a number of data formats which simulations/real robot experiments can output their data (e.g., the number of robots engaged in a given task over time) for processing. SIERRA can generate various statistics from the results, such as confidence intervals on observed behavior.
4. Generating deliverables
SIERRA can generate many deliverables from the processed experimental results automatically (independent of the platform/execution environment!), thus greatly simplifying reproduction of previous results if you need to tweak a given graph (for example). SIERRA currently supports generating the following deliverables:
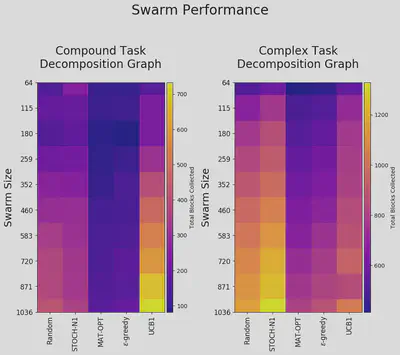
Camera-ready linegraphs, heatmaps, 3D surfaces, and scatterplots directly from averaged/statistically processed experimental data using matplotlib .
Videos built from frames captured during simulation or real robot operation.
Videos built from captured experimental output .csv files.
SIERRA has rich support for running arbitrary models against experimental data (or stand-alone) to generate predictions and plotting the results together.
Some examples are below.
Image plots
| Heatmaps from output .csv files | Linegraphs from output .csv files |
|---|---|
 |  |
 | 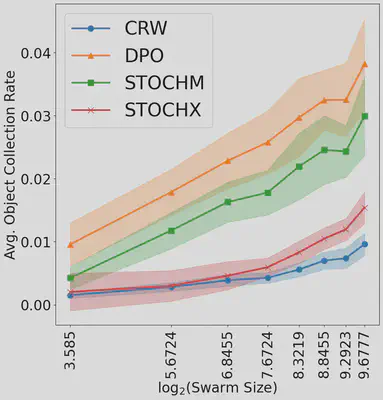 |
Videos from from output .csv files
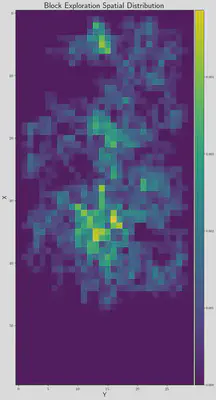
In the below videos, we show demonstrate rendering two-dimensional .csv files from simulation outputs into images which are then stitched together into videos. This can be useful to observe how the spatial distribution of different aspects of robot behaviors (e.g., robot occupancy, inter-robot interference, task execution location, etc.) change over time. Videos are built from .csv files rendered into images using matplotlib.
Videos from captured simulation visual frames
ARGoS video of 16,000 robots swarming. This demonstrates capturing of visual simulation information and stitching together images into videos.
ARGoS videos of robots performing foraging. This demonstrates SIERRA’s
utilization of multiple ARGoS cameras+interpolation (--camera-config) between
them to create nice videos. Colored lines indicate the virtual “forces” acting
on robots: motion towards light, collision avoidance, etc. (not part of SIERRA).
5. Controller/scenario comparison
SIERRA can take pieces from graphs generated in stage 4 (e.g., individual lines)and put them on a single graph to generate camera ready comparison graphs. It can generate comparison graphs for:
- Different robot controllers which have all been run in the same scenario.
- A single robot controller which has been run in multiple scenarios.
Some examples are below.
| Combined Heatmaps | Combined Linegraphs |
|---|---|
 | 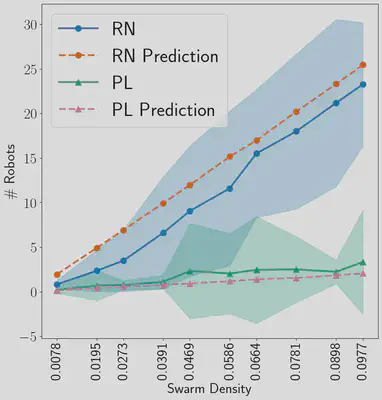 |
SIERRA Platform Support
SIERRA currently supports the following platforms, allowing you to use the same interface for the below pipeline to automate your research workflow:
ARGoS for fast simulation of large robot swarms via multiple physics engines.
Gazebo for ROS1+Gazebo.
ROS1 for ROS1 on a real robot.
To define additional platforms, see the docs.
SIERRA Demonstration Context
To demonstrate the capabilities of SIERRA by performing a mini-investigation, we will use a foraging (object gathering) task. The video below should give you some idea of how a system of N foraging robots might perform on a foraging task. This video was automatically generated by SIERRA using captured ARGoS frames.
Demonstration: Experiment Generation (stage 1)
Given a research question such as “How will system behavior change if I change the system size from 1…10?” as an independent variable, SIERRA can automate the generation of experiments to answer this question for a variety of platforms (simulators or real robots).
The user (1) defines an arbitrary cmdline syntax to express a class of research
questions (a --batch-criteria), (2) defines changes, additions, or removals
to/from a template input XML file based on the specific instance of the query,
and (3) SIERRA does the rest. For example, if we define
population_size.{increment_type}{N} to answer queries similar to the one posed
above, we can then pass population_size.Linear10 to direct SIERRA to generate
10 experiments with different system sizes 1…10. How to change the system size
is application dependent, which is why the user has to define how to do so via
(2).
Depending on the nature of our system, experiments may be deterministic, in
which case we only need to run each experiment once. However, for many
applications, there is some aspect of non-determinism (e.g., noise from real
robot sensors/actuators), in which case we need to run each experiment multiple
times. SIERRA handles this cleanly as well through the --n-runs option. Each
experimental run is given its own random seed (which, for maximum
reproducibility is not overwritten if experiments are regenerated, unless forced
via --no-preserve-seeds).
Example Template Input Files
Note: the below are partial template input files to demonstrate SIERRA’s capabilities, and are not likely functional as-is with ARGoS or ROS1.
The ARGoS ideal.argos is based on the ARGoS foraging example
here. The ROS1+Gazebo and
ROS1+Turtlebot3 turtlebot3_sim.launch is based on the ROBOTIS Gazebo example
here.
ARGoS (ideal.argos)
<?xml version="1.0" ?>}
<argos-configuration>
<framework>
<system threads="0" />
<experiment length="0"
ticks_per_second="10"
random_seed="123" />
</framework>
<controllers>
<footbot_foraging_controller id="ffc"
library="build/libsample_project">
<actuators>
<differential_steering implementation="default" />
<leds implementation="default" medium="leds" />
<range_and_bearing implementation="default" />
</actuators>
<sensors>
<footbot_proximity implementation="default" show_rays="false" />
<footbot_light implementation="rot_z_only" show_rays="false" />
<footbot_motor_ground implementation="rot_z_only" />
<range_and_bearing implementation="medium" medium="rab" />
</sensors>
<params>
<diffusion go_straight_angle_range="-5:5"
delta="0.1" />
<wheel_turning hard_turn_angle_threshold="90"
soft_turn_angle_threshold="70"
no_turn_angle_threshold="10"
max_speed="10" />
<state initial_rest_to_explore_prob="0.1"
initial_explore_to_rest_prob="0.1"
food_rule_explore_to_rest_delta_prob="0.01"
food_rule_rest_to_explore_delta_prob="0.01"
collision_rule_explore_to_rest_delta_prob="0.01"
social_rule_explore_to_rest_delta_prob="0.01"
social_rule_rest_to_explore_delta_prob="0.01"
minimum_resting_time="50"
minimum_unsuccessful_explore_time="600"
minimum_search_for_place_in_nest_time="50">
<food_rule active="true" food_rule_explore_to_rest_delta_prob="0.01" />
</state>
</params>
</footbot_foraging_controller>
</controllers>
<loop_functions library="build/libsample_project"
label="foraging_loop_functions">
<foraging items="15"
radius="0.1"
energy_per_item="1000"
energy_per_walking_robot="1"
output_dir="output"
datafile="collected-data.csv"/>
</loop_functions>
<arena size="5, 5, 2" center="0,0,1">
<floor id="floor"
source="loop_functions"
pixels_per_meter="50" />
<box id="wall_north" size="4,0.1,0.5" movable="false">
<body position="0,2,0" orientation="0,0,0" />
</box>
<box id="wall_south" size="4,0.1,0.5" movable="false">
<body position="0,-2,0" orientation="0,0,0" />
</box>
<box id="wall_east" size="0.1,4,0.5" movable="false">
<body position="2,0,0" orientation="0,0,0" />
</box>
<box id="wall_west" size="0.1,4,0.5" movable="false">
<body position="-2,0,0" orientation="0,0,0" />
</box>
<light id="light_1"
position="-2,-1.5,1.0"
orientation="0,0,0"
color="yellow"
intensity="3.0"
medium="leds" />
<light id="light_2"
position="-2,-0.5,1.0"
orientation="0,0,0"
color="yellow"
intensity="3.0"
medium="leds" />
<light id="light_3"
position="-2,0.5,1.0"
orientation="0,0,0"
color="yellow"
intensity="3.0"
medium="leds" />
<light id="light_4"
position="-2,1.5,1.0"
orientation="0,0,0"
color="yellow"
intensity="3.0"
medium="leds" />
<distribute>
<position method="uniform" min="-2,-2,0" max="-1,2,0" />
<orientation method="uniform" min="0,0,0" max="360,0,0" />
<entity quantity="20" max_trials="100">
<foot-bot id="fb">
<controller config="ffc" />
</foot-bot>
</entity>
</distribute>
</arena>
<physics_engines>
<dynamics2d id="dyn2d" />
</physics_engines>
<media>
<range_and_bearing id="rab" />
<led id="leds" />
</media>
<visualization>
<qt-opengl>
<camera>
<placements>
<placement index="0" position="0,0,4.34" look_at="0,0,0" up="1,0,0" lens_focal_length="20" />
</placements>
</camera>
<user_functions label="foraging_qt_user_functions" />
</qt-opengl>
</visualization>
</argos-configuration>
ROS1+Gazebo (turtlebot3_sim.launch)
</launch>
<params>
<controllers>
<__CONTROLLER__ id="ffc"
library="foo">
<params>
<rng seed="123"/>
<output
output_parent="output"
output_leaf="__current_date__"
/>
</params>
</__CONTROLLER__>
</controllers>
</params>
ROS1+Turtlebot3 (turtlebot3_real.launch)
ARGoS input files after SIERRA processing
Using the following SIERRA command with the above template:
sierra-cli \
--sierra-root=$HOME/exp \
--template-input-file=templates/ideal.argos \
--n-runs=1 \
--project=fordyca \
--physics-n-engines=1 \
--time-setup=time_setup.T500 \
--controller=d0.CRW \
--scenario=SS.12x6x1 \
--batch-criteria population_size.Linear10 \
--with-robot-leds
We obtain the following for experiment 0 (which has 1 robot):
Experiment 0 (from ideal.argos)
<?xml version="1.0" ?>
<argos-configuration>
<framework>
<system threads="1"/>
<experiment length="500" ticks_per_second="5" random_seed="49167736"/>
</framework>
<controllers>
<footbot_foraging_controller id="ffc" library="libargos_project">
<actuators>
<differential_steering implementation="default"/>
</actuators>
<sensors>
<footbot_proximity implementation="default" show_rays="false"/>
<footbot_light implementation="rot_z_only" show_rays="false"/>
<footbot_motor_ground implementation="rot_z_only"/>
</sensors>
<params>
<diffusion go_straight_angle_range="-5:5" delta="0.1"/>
<wheel_turning hard_turn_angle_threshold="90" soft_turn_angle_threshold="70" no_turn_angle_threshold="10" max_speed="10"/>
<state initial_rest_to_explore_prob="0.1" initial_explore_to_rest_prob="0.1" food_rule_explore_to_rest_delta_prob="0.01" food_rule_rest_to_explore_delta_prob="0.01" collision_rule_explore_to_rest_delta_prob="0.01" social_rule_explore_to_rest_delta_prob="0.01" social_rule_rest_to_explore_delta_prob="0.01" minimum_resting_time="50" minimum_unsuccessful_explore_time="600" minimum_search_for_place_in_nest_time="50">
<food_rule active="true" food_rule_explore_to_rest_delta_prob="0.01"/>
</state>
</params>
</footbot_foraging_controller>
</controllers>
<loop_functions library="libargos_project" label="foraging_loop_functions">
<foraging items="15" radius="0.1" energy_per_item="1000" energy_per_walking_robot="1" output_dir="/home/jharwell/exp/test/argos_project/foraging.footbot_foraging/template-LowBlockCount.10x10x1+population_size.Log8/exp-outputs/exp0/template_0_output/output" datafile="collected-data.csv"/>
</loop_functions>
<arena size="5, 5, 2" center="0,0,1">
<floor id="floor" source="loop_functions" pixels_per_meter="50"/>
<box id="wall_north" size="4,0.1,0.5" movable="false">
<body position="0,2,0" orientation="0,0,0"/>
</box>
<box id="wall_south" size="4,0.1,0.5" movable="false">
<body position="0,-2,0" orientation="0,0,0"/>
</box>
<box id="wall_east" size="0.1,4,0.5" movable="false">
<body position="2,0,0" orientation="0,0,0"/>
</box>
<box id="wall_west" size="0.1,4,0.5" movable="false">
<body position="-2,0,0" orientation="0,0,0"/>
</box>
<light id="light_1" position="-2,-1.5,1.0" orientation="0,0,0" color="yellow" intensity="3.0" medium="leds"/>
<light id="light_2" position="-2,-0.5,1.0" orientation="0,0,0" color="yellow" intensity="3.0" medium="leds"/>
<light id="light_3" position="-2,0.5,1.0" orientation="0,0,0" color="yellow" intensity="3.0" medium="leds"/>
<light id="light_4" position="-2,1.5,1.0" orientation="0,0,0" color="yellow" intensity="3.0" medium="leds"/>
<distribute>
<position method="uniform" min="-2,-2,0" max="-1,2,0"/>
<orientation method="uniform" min="0,0,0" max="360,0,0"/>
<entity quantity="1" max_trials="100">
<foot-bot id="fb">
<controller config="ffc"/>
</foot-bot>
</entity>
</distribute>
</arena>
<physics_engines>
<dynamics2d id="dyn2d"/>
</physics_engines>
</argos-configuration>
Important Notes
Many subtrees have been stripped out according to configuration:
<visualization>,<range_and_bearing>, etc.Random seed set.
# of robots modified according to
--batch-criteria.--physics-n-engineswas set to 1. If it was > 1, then SIERRA would handle setting up ARGoS with multiple engines for you.Unique output directories set according to configuration (this is a
--projectspecific add on to SIERRA).The length of the simulation was set to 500 seconds.
Ros+Gazebo input files after SIERRA processing
Using the following SIERRA command with the above ROS1+Gazebo template:
sierra-cli \
--platform=platform.rosgazebo \
--project=ros_project \
--n-runs=4 \
--template-input-file=exp/ideal.launch \
--scenario=HouseWorld.10x10x1 \
--sierra-root=$HOME/exp \
--batch-criteria population_size.Linear10 \
--controller=turtlebot3_sim.wander \
--time-setup=time_setup.T50
--robot turtlebot3 \
--robot-positions 0,0,0 1,1,0 2,2,0 3,3,0 4,4,0 5,5,0 6,6,0 7,7,0 8,8,0 9,9,0, 10,10,0
We obtain the following for experiment 0 (1 robot):
Experiment 0 (from turtlebot3_house.launch)
<?xml version="1.0" ?>
<launch>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/turtlebot3_house.world"/>
<arg name="use_sim_time" value="true"/>
<arg name="verbose" value="true"/>
<arg name="server_required" value="true"/>
<arg name="gui" value="false"/>
</include>
<group ns="tb3_0">
<param name="tf_prefix" value="tb3_0"/>
<param name="robot_description" command="$(find xacro)/xacro $(find turtlebot3_description)/urdf/turtlebot3_burger.urdf.xacro"/>
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-urdf -model turtlebot3_burger_tb3_0 -x 5.0 -y 5.0 -z 0.0 -param robot_description"/>
<node name="turtlebot3_drive" pkg="turtlebot3_gazebo" type="turtlebot3_drive" required="true"/>
<param name="cmd_vel_topic_name" value="cmd_vel"/>
</group>
<param name="sierra/experiment/length" value="10"/>
<node name="sierra_timekeeper" pkg="sierra_rosbridge" type="sierra_timekeeper.py" required="true"/>
<param name="sierra/experiment/random_seed" value="527758144"/>
<param name="sierra/experiment/param_file" value="/home/jharwell/exp/test/ros_project/turtlebot3_sim.wander/turtlebot3_house-HouseWorld.10x10x1+population_size.Linear10/exp-inputs/exp0/turtlebot3_house_0.params"/>
</launch>
Important Notes
The SIERRA command takes slightly different arguments because a different
--platformis selected.The
--robotargument and--controllerarguments allows the user to tell SIERRA to add any robot or controller specific nodes to the template.launchfile, or to otherwise make arbiratry changes to it prior to SIERRA applying the--batch-criteriato it to generate the experiments.The starting positions of the robots are specified precisely here; SIERRA can also draw them randomly from the specified scenario dimensions (
10x10here).Since Gazebo+ROS1 doesn’t have a way to say “Stop running after this long”, SIERRA inserts a timekeeper node to provide this functionality.
SIERRA can utilize the ROS1 parameter server when making changes to the template input file (all parameters under
<launch>), or write to a separate.paramsfile (all parameters under<params>) as shown here. This is useful for sharing code between ROS1 and other robotic platforms which require strictly XML parameters.
Ros+Turtlebot3 input files after SIERRA processing
Using the following SIERRA command with the above ROS1+Turtlebot3 template:
sierra-cli \
--platform=platform.rosrobot \
--project=ros_project \
--n-runs=4 \
--template-input-file=exp/turtlebot3_real.launch \
--scenario=HouseWorld.10x10x1 \
--sierra-root=$HOME/exp \
--batch-criteria population_size.Linear10 \
--controller=turtlebot3_real.wander \
--time-setup=time_setup.T50 \
--robot turtlebot3
We obtain the following for experiment 0 (1 robot):
Experiment 0 (from turtlebot3_real.launch)
<launch>
<group ns="tb3_0">
<param name="tf_prefix" value="tb3_0"/>
<include file="$(find turtlebot3_bringup)/launch/turtlebot3_core.launch"/>
<include file="$(find turtlebot3_bringup)/launch/turtlebot3_lidar.launch"/>
<node name="turtlebot3_drive" pkg="turtlebot3_gazebo" type="turtlebot3_drive" required="true"/>
<param name="cmd_vel_topic_name" value="cmd_vel"/>
</group>
<param name="sierra/experiment/length" value="10"/>
<param name="sierra/experiment/ticks_per_sec" value="1000"/>
<node name="sierra_timekeeper" pkg="sierra_rosbridge" type="sierra_timekeeper.py" required="true"/>
<param name="sierra/experiment/random_seed" value="415741535"/>
<param name="sierra/experiment/param_file" value="/home/jharwell/exp/test/ros_project/turtlebot3_real.wander/turtlebot3_real-HouseWorld.10x10x1+population_size.Linear10/exp-inputs/exp0/turtlebot3_real_0.params"/>
</launch>
Demonstration: Experiment Execution (stage 2)
Can be on real robot hardware, HPC resources, or the local machine.
To change execution environment, change
--exec-env(e.g., toexec-env=hpc.slurmfor a SLURM cluster).If needed, IP addresses of machines/robots can be provided to SIERRA via
--nodefileon an environment variable.
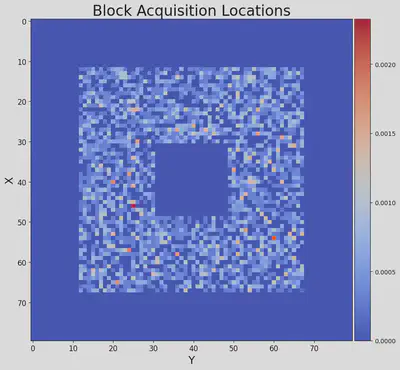
Demonstration: Experiment Results Processing (stage 3)
As seen in the examples above, one of the things that SIERRA can do in stage 3 is take .csv files like the one output below, and transform them into .png files to be stitched together into videos in stage 4. A .csv - .png pair is shown below.
Raw .csv from outputs
| y0 | y1 | y2 | y3 | y4 | y5 | y6 | y7 | y8 | y9 | y10 | y11 | y12 | y13 | y14 | y15 | y16 | y17 | y18 | y19 | y20 | y21 | y22 | y23 | y24 | y25 | y26 | y27 | y28 | y29 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.002240 | 0.000000 | 0.001400 | 0.003780 | 0.001540 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.002940 | 0.001960 | 0.004760 | 0.007000 | 0.003360 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001120 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.003500 | 0.004340 | 0.007280 | 0.002940 | 0.001820 | 0.001680 | 0.001680 | 0.000700 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001260 | 0.001960 | 0.000000 | 0.001960 | 0.001680 | 0.003500 | 0.002100 | 0.001680 | 0.001400 | 0.000000 | 0.000000 | 0.000000 | 0.001680 | 0.004480 | 0.001820 | 0.002940 | 0.002380 | 0.000700 | 0.000000 | 0.000000 | 0.001680 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000560 | 0.001960 | 0.000000 | 0.000000 | 0.002660 | 0.002380 | 0.001680 | 0.003360 | 0.000700 | 0.000000 | 0.000000 | 0.001680 | 0.004900 | 0.001120 | 0.004760 | 0.000000 | 0.000000 | 0.000840 | 0.001960 | 0.001400 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001680 | 0.002520 | 0.003920 | 0.008820 | 0.002380 | 0.000980 | 0.001680 | 0.003220 | 0.006300 | 0.004760 | 0.002940 | 0.001680 | 0.001260 | 0.000420 | 0.001960 | 0.003220 | 0.001400 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000980 | 0.001260 | 0.001540 | 0.000420 | 0.002520 | 0.003080 | 0.002660 | 0.000840 | 0.005320 | 0.004620 | 0.003220 | 0.000280 | 0.000000 | 0.000420 | 0.001960 | 0.001400 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001260 | 0.002380 | 0.001540 | 0.001400 | 0.002380 | 0.001120 | 0.006300 | 0.003220 | 0.001680 | 0.000840 | 0.000420 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.003500 | 0.000840 | 0.004760 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001120 | 0.002520 | 0.003640 | 0.004760 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001680 | 0.000000 | 0.001120 | 0.000560 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001820 | 0.000000 | 0.000140 | 0.001400 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001820 | 0.001120 | 0.000000 | 0.000420 | 0.001260 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000840 | 0.002520 | 0.000140 | 0.002940 | 0.003500 | 0.003080 | 0.001820 | 0.000700 | 0.001680 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001820 | 0.001540 | 0.002940 | 0.000420 | 0.000000 | 0.000000 | 0.002240 | 0.001120 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000700 | 0.001680 | 0.001960 | 0.004900 | 0.000560 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001680 | 0.001540 | 0.000980 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.004760 | 0.001680 | 0.000000 | 0.000840 | 0.001400 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000980 | 0.004480 | 0.002520 | 0.005180 | 0.002240 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.002940 | 0.001400 | 0.002380 | 0.001540 | 0.002800 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000980 | 0.000000 | 0.000000 | 0.000000 | 0.001820 | 0.003080 | 0.002800 | 0.001120 | 0.001540 | 0.001680 | 0.001540 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000840 | 0.001680 | 0.001680 | 0.001680 | 0.001540 | 0.002240 | 0.000280 | 0.001820 | 0.000420 | 0.001960 | 0.001680 | 0.000420 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001820 | 0.001120 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.003640 | 0.001400 | 0.001960 | 0.000000 | 0.000000 | 0.003360 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.002100 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.003640 | 0.000700 | 0.001680 | 0.002520 | 0.000000 | 0.001680 | 0.000560 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000140 | 0.002380 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.003500 | 0.001400 | 0.004620 | 0.001260 | 0.000000 | 0.000420 | 0.001400 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001680 | 0.000000 | 0.000000 | 0.000000 | 0.001400 | 0.001540 | 0.003500 | 0.002380 | 0.000000 | 0.001680 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000980 | 0.000980 | 0.000280 | 0.000700 | 0.001540 | 0.003220 | 0.000840 | 0.001680 | 0.001260 | 0.000000 | 0.001680 | 0.000000 | 0.000420 | 0.000700 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001400 | 0.001540 | 0.002800 | 0.002660 | 0.001120 | 0.002800 | 0.008540 | 0.001260 | 0.001680 | 0.000000 | 0.000000 | 0.000560 | 0.001960 | 0.001680 | 0.001680 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001540 | 0.001260 | 0.000000 | 0.000000 | 0.001820 | 0.000700 | 0.003080 | 0.004480 | 0.001680 | 0.000420 | 0.005880 | 0.002240 | 0.001680 | 0.000000 | 0.000560 | 0.000000 | 0.000700 | 0.001820 | 0.000840 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001540 | 0.000420 | 0.001960 | 0.001120 | 0.001260 | 0.001960 | 0.002240 | 0.001960 | 0.003640 | 0.004760 | 0.007560 | 0.001260 | 0.000980 | 0.001820 | 0.001680 | 0.000560 | 0.000280 | 0.001960 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.001260 | 0.001960 | 0.000000 | 0.000000 | 0.003220 | 0.001820 | 0.001680 | 0.004760 | 0.006020 | 0.002100 | 0.002100 | 0.006720 | 0.003220 | 0.001260 | 0.002660 | 0.000140 | 0.001960 | 0.001400 | 0.000280 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.001820 | 0.001260 | 0.002520 | 0.002240 | 0.003920 | 0.001680 | 0.000840 | 0.000000 | 0.000280 | 0.006020 | 0.007140 | 0.006300 | 0.002520 | 0.000000 | 0.000560 | 0.002240 | 0.001960 | 0.001680 | 0.000140 | 0.001680 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000140 | 0.003780 | 0.001400 | 0.001540 | 0.001400 | 0.001680 | 0.000000 | 0.000000 | 0.001820 | 0.001680 | 0.001820 | 0.007560 | 0.005040 | 0.004340 | 0.000000 | 0.000000 | 0.001540 | 0.002240 | 0.003220 | 0.001820 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.002100 | 0.003220 | 0.002240 | 0.000280 | 0.001680 | 0.001120 | 0.000000 | 0.000000 | 0.001680 | 0.000980 | 0.003780 | 0.007700 | 0.003640 | 0.006020 | 0.002100 | 0.003500 | 0.005040 | 0.003220 | 0.002240 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000980 | 0.001820 | 0.000000 | 0.000000 | 0.000000 | 0.001820 | 0.003220 | 0.006720 | 0.005180 | 0.005040 | 0.009240 | 0.008260 | 0.006160 | 0.001680 | 0.001820 | 0.007140 | 0.001540 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001960 | 0.004340 | 0.006720 | 0.005320 | 0.004340 | 0.003780 | 0.004060 | 0.001400 | 0.002380 | 0.003500 | 0.006300 | 0.000420 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001960 | 0.004060 | 0.001120 | 0.004200 | 0.003360 | 0.003500 | 0.001960 | 0.000420 | 0.005460 | 0.005880 | 0.002240 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001680 | 0.002520 | 0.002800 | 0.004200 | 0.006580 | 0.005180 | 0.001680 | 0.001820 | 0.000000 | 0.000000 | 0.001960 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001960 | 0.000280 | 0.000840 | 0.007000 | 0.003500 | 0.002800 | 0.002380 | 0.001680 | 0.000840 | 0.000280 | 0.003780 | 0.000840 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001960 | 0.002240 | 0.005040 | 0.001120 | 0.003500 | 0.004620 | 0.002520 | 0.000980 | 0.002380 | 0.000980 | 0.003360 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001540 | 0.001960 | 0.005600 | 0.003080 | 0.001680 | 0.002940 | 0.002660 | 0.000000 | 0.000000 | 0.000000 | 0.001260 | 0.001120 | 0.001960 | 0.001820 | 0.000840 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001540 | 0.002520 | 0.003080 | 0.000000 | 0.001820 | 0.001540 | 0.000560 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001260 | 0.001960 | 0.000700 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001960 | 0.003780 | 0.002800 | 0.001400 | 0.000560 | 0.001820 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001960 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.002800 | 0.001820 | 0.001680 | 0.000000 | 0.000700 | 0.002100 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001540 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.003640 | 0.000420 | 0.000420 | 0.000000 | 0.000000 | 0.001680 | 0.000140 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.003500 | 0.000560 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.001260 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000280 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
“Imagized” .csv
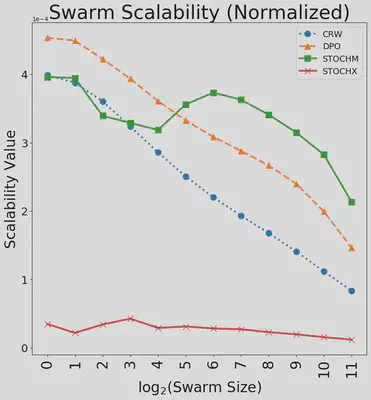
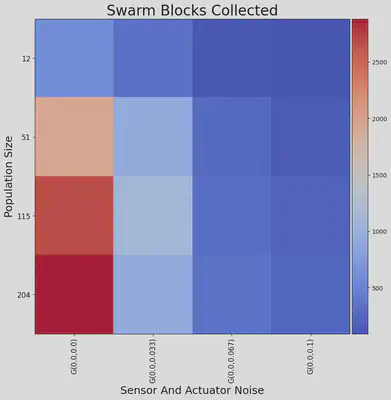
Demonstration: Experimental Results Visualization (stage 4)
Exploring Independent Variables
Exploring the behavior of the an algorithm across swarm sizes 1,2,4,8 by passing
--batch-criteria population_size.Log8; the specification for how many sizes to test with is not hardcoded in SIERRA, but parsed at runtime, so it can be anything.Full SIERRA command
sierra-cli \ --sierra-root=$HOME/exp\ --template-input-file=templates/2022-aamas-demo.argos \ --project=fordyca\ --physics-n-engines=1\ --time-setup=time_setup.T1000\ --batch-criteria population_size.Log8\ --models-disable\ --no-verify-resultsPutting box confidence on some of the generated graphs by re-running SIERA stages 3 and 4 by adding
--pipeline 3 4 --dist-stats=conf95to my SIERRA command.Updated SIERRA command
sierra-cli \ --sierra-root=$HOME/exp\ --template-input-file=templates/2022-aamas-demo.argos \ --project=fordyca\ --physics-n-engines=1\ --time-setup=time_setup.T1000\ --batch-criteria population_size.Log8\ --models-disable\ --no-verify-results\ --pipeline 3 4\ --dist-stats=conf95Running additional simulations after (for example) I realize the confidence intervals on the graphs are not tight enough, and changing my mind and and putting box and whisker plots on the graphs instead of confidence intervals, by adding
--exec-resume --dist-stats=bw --n-sims=16to my SIERRA command. Note how SIERRA does not re-run simulations which have already finished!Updated SIERRA command
sierra-cli \ --sierra-root=$HOME/exp\ --template-input-file=templates/2021-ijcai-demo.argos \ --project=fordyca\ --physics-n-engines=1\ --time-setup=time_setup.T1000\ --batch-criteria population_size.Log8\ --models-disable\ --no-verify-results\ --exec-resume\ --dist-stats=bw\ --n-sims=16
SIERRA In The Wild
SIERRA has been used in many of my research projects:
And publications:
John Harwell
Researcher and Engineer
Experienced embedded systems engineer whose research interests include multi-agent modeling and behaviors, swarm intelligence, bio-inspired algorithms and multi-robot systems, and computational optimization.

